随着人工智能(AI)和机器人技术的普及,教育领域正迎来一场深刻的变革。将易于上手的图形化编程工具Scratch与工业级的机器人操作系统(ROS)相结合,为设计和实现教育机器人的人工智能应用软件提供了一条独特且高效的路径。这种融合不仅降低了机器人编程的入门门槛,激发了学习者的创造力,还能无缝衔接到专业的开发环境中。本文将系统阐述这一设计与实现过程。
一、设计理念:分层架构与渐进学习
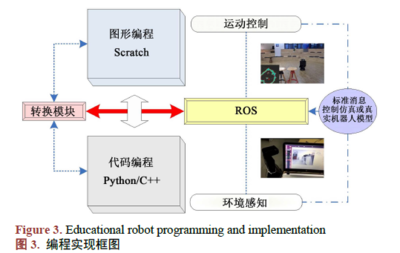
核心设计理念在于构建一个分层、模块化的软件架构,并遵循从直观到抽象、从简单到复杂的渐进学习曲线。
- 用户交互层(Scratch界面层):作为顶层,为初学者(尤其是K-12学生)提供图形化积木块编程环境。通过拖拽预先封装好的、代表机器人核心功能(如移动、传感器读取、简单视觉识别)的积木块,学习者可以快速搭建出机器人的行为逻辑,实现避障、巡线、人脸跟踪等基础AI应用。这一层屏蔽了底层复杂的代码和ROS通信细节。
- 中间转换与桥接层:这是实现融合的关键。需要一个专门的“桥接”软件或服务,负责将Scratch中生成的图形化逻辑,实时翻译并映射为标准的ROS消息和服务调用。例如,一个“前进”积木块会被转换为向
/cmd<em>vel话题发布一个geometry</em>msgs/Twist类型的速度消息。常见的工具包括Scratch的官方扩展(如Scratch Link)、或第三方开源项目如ROS-Scratch-Interface、scratch_ros等。
- 核心功能层(ROS节点层):这是机器人的“大脑”。在ROS框架下,每个独立的AI功能都被实现为一个或多个松耦合的节点(Node)。例如:
- 感知节点:处理摄像头数据,运行基于OpenCV或简单深度学习模型(如MobileNet SSD)的目标检测、人脸识别算法,并将结果(如目标位置)发布到特定话题。
- 决策与控制节点:订阅感知节点的话题和底层传感器(如激光雷达、IMU)话题,根据Scratch层下发的指令或内置的AI策略(如强化学习策略),计算出控制指令(速度、关节角度),并发布给执行器。
- 仿真与可视化(可选但推荐):利用Gazebo等ROS仿真环境,在虚拟世界中安全、低成本地测试和演示AI算法与机器人行为。
- 硬件抽象层(ROS驱动层):直接与机器人底盘、电机、传感器等物理硬件通信,将ROS的标准消息格式转换为硬件能理解的指令,反之亦然。这确保了软件的核心逻辑与具体硬件解耦,提高了可移植性。
二、实现步骤
第一阶段:环境搭建与基础功能封装
1. 搭建ROS开发环境:在机器人主控计算机(如树莓派、Jetson Nano或PC)上安装ROS(推荐Noetic或Humble等版本)。
2. 封装基础ROS功能为Scratch积木:确定需要通过Scratch控制的核心功能(如:移动、读取超声波距离、获取摄像头图像、启动语音识别)。针对每个功能,在桥接层编写对应的接口,使其在Scratch中表现为一个可用的积木块。例如,创建一个“当检测到人脸时”的事件积木,其背后是订阅了人脸识别节点发布的话题。
第二阶段:开发核心AI功能节点
1. 实现感知AI节点:使用ROS的视觉或语音包。例如,利用cv_bridge将ROS图像消息转换为OpenCV格式,运行一个训练好的轻量级TensorFlow或PyTorch模型进行物体分类,再将分类结果和位置信息封装成自定义ROS消息发布出去。
2. 实现决策与控制节点:编写节点来协调行为。例如,一个“自动巡逻并避障”的节点,会同时订阅激光雷达数据(用于避障)和Scratch下发的“开始巡逻”命令,并综合计算安全的速度指令。
第三阶段:集成、测试与项目式学习
1. 集成测试:启动所有ROS节点和Scratch桥接服务。在Scratch中搭建程序,观察机器人在真实环境或Gazebo仿真中的响应。
2. 设计层次化学习项目:
* 入门级:在Scratch中用积木让机器人画正方形、根据声音大小改变LED灯颜色。
- 进阶级:实现“声控导航”(Scratch处理语音命令,触发ROS导航栈)或“颜色追踪”(Scratch设定目标颜色,ROS视觉节点处理图像并反馈位置,控制节点驱动云台和底盘跟随)。
- 挑战级:在Scratch中设计一个简单的“智能家居助手”逻辑,整合ROS中的多个AI节点,如人脸识别开门、语音命令控制、物体搬运等,完成一个综合性的AI应用场景。
三、优势与展望
优势:
低门槛,高上限:Scratch确保了趣味性和可及性,ROS则提供了无限的专业扩展可能。
理解完整技术栈:学习者能直观理解从用户交互、应用逻辑、AI算法到底层控制的完整软件开发生命周期。
* 培养计算思维与工程思维:在模块化设计和问题分解中,潜移默化地培养了系统性思维能力。
展望:随着边缘AI计算能力的提升和预训练模型的微型化,可以直接在Scratch中引入更复杂的AI积木(如“训练一个图像分类器”积木),背后自动调用ROS中的模型训练与部署流程。结合云端ROS和可视化编程的在线协作平台,将使教育机器人AI软件开发更具协作性和共享性。
通过精心设计的分层架构,将Scratch的易用性与ROS的强大能力相结合,我们能够构建一个极具吸引力的教育平台,让不同年龄段和水平的学习者都能亲手设计和实现属于自己的人工智能机器人应用,在实践中点燃对前沿科技的热情。